
An open-source perception and movement system, to be developed with NSF funding, could enable robots that partner with humans in fires and disaster areas.
Tomorrow’s wildfire fighters and other first responders may tag-team with robotic assistants that can hike through wilderness areas and disaster zones, thanks to a University of Michigan research project funded by a new $1 million grant from the National Science Foundation.
A key goal of the three-year project is to enable robots to navigate in real time, without the need for a preexisting map of the terrain they’re to traverse.
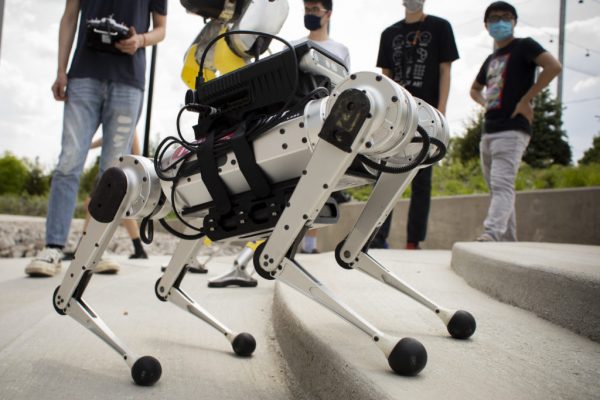
The project aims to take bipedal (or two-legged) walking robots to a new level, equipping them to adapt on the fly to treacherous ground, dodge obstacles or decide whether a given area is safe for walking. The technology could enable robots to go into areas that are too dangerous for humans, including collapsed buildings and other disaster areas. It could also lead to prosthetics that are more intuitive for their users.
“I envision a robot that can walk autonomously through the forest here on North Campus and find an object we’ve hidden. That’s what’s needed for robots to be useful in search and rescue, and no robot right now can do it,” said Jessy Grizzle, principal investigator on the project and the Elmer G. Gilbert Distinguished University Professor of Engineering at U-M.
Read the rest of the article about designing first-responder robots on the Michigan Engineering site.